Дослідники зі Стенфордського університету створили прототип квадрокоптера, який здатний сідати на вертикальні площини і дертися ними. Квадрокоптер під назвою SCAMP здатний літати, а також висіти і повзати по вертикальних поверхнях без допомоги роторів.
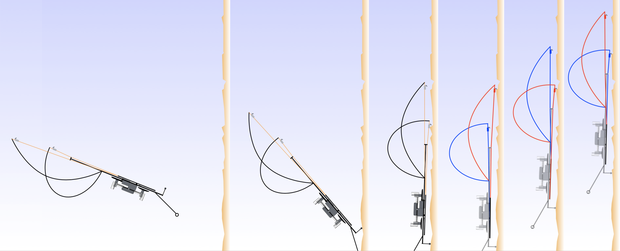
При підльоті до вертикальної площини дрон за допомогою акселерометра визначає контакт із перешкодою і два з чотирьох роторів починають обертатися швидше, «перекидаючи» безпілотник у вертикальне положення. Робот впирається заднім упором і двома ніжками у стіну, а ротори обертаються до тих пір, поки не зникнуть коливання — після цього безпілотник може відключити двигуни.
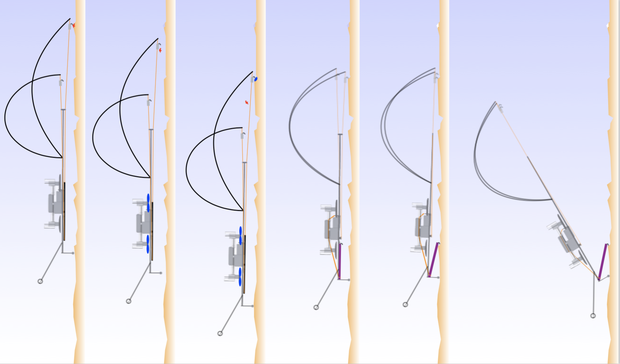
Для пересування робот використовує дві ніжки, на яких по черзі підтягується. У контактних майданчиках ніжок встановлені металеві кігті, які можуть чіплятися за найменші нерівності поверхні. У разі зриву безпілотник швидко реагує включенням роторів і, тим самим, запобігає аварії, що вигідно відрізняє його від звичайних плазуючих роботів. Після роботи в вертикальному положенні робот здатний самостійно перейти назад у режим квадрокоптера.
Така схема роботи, за словами авторів, дозволяє значно заощадити заряд акумулятора за рахунок відключення роторів. При цьому посадка на вертикальну поверхню може бути критичним умінням для безпілотника, що працює, наприклад, у зоні стихійного лиха — будови, що обрушилися, ускладнюють пошук рівного майданчика для посадки звичайного мультикоптера, у той час як стіни часто частково зберігаються після обвалення будівлі.
Автори особливо відзначають, що більшість існуючих безпілотників, здатних до складних маневрів, можуть працювати тільки в лабораторних умовах із додатковою системою позиціонування або окремим комп’ютером, що керує польотом дрона. Однак квадрокоптеру SCAMP не потрібне додаткове обладнання — безпілотник може пересуватися як усередині приміщень, так і на вулиці, спираючись при зміні режимів пересування тільки на власні обчислювальні можливості та показання бортових датчиків.
Раніше розробники вже демонстрували можливість кріплення подібної системи на безпілотник літакового типу. За їх словами, безпілотники, що чіпляються за стіни, ідеально підходять для збору даних при надзвичайних ситуаціях. Крім збору даних такі дрони можуть нести на собі ретранслятори для оперативного розгортання мережі або мережі передачі даних. Новий прототип може повзати по стіні, що дозволяє пересувати робота в пошуках найкращого положення для прийому і передачі радіосигналів.
Раніше інженери з Корейського інституту передових технологій представили квадрокоптер, здатний пересуватися по вертикальних поверхнях за допомогою коліс, на базі якого пізніше розробили прототип вогнетривкого протипожежного квадрокоптера, здатного пересуватися по стінах всередині палаючої будівлі. Крім того, розробкою робота з роторами, що їздить по стінах, також займалися фахівці з Disney Research.
Джерело: slavpeople.com
Залишити відповідь